Now that I'm down with my dissertation, it's time to make some improvements...I've added two new pages to my site: Publications and Software. I'll be updating these periodically with my pubs and some of the software/code that's floating around.
Both of these new pages have been added to the navigation tabs at the top of the page.
Enjoy!
Tuesday, December 23, 2014
Thursday, December 4, 2014
LiDAR datum transformations
 So, I've been helping get an Earth Science graduate student going on some change detection work with some lidar data from the State of Vermont. As we were going through some of the sample datasets an interesting, yet not surprising, realization came over us...several of the datasets were in different projections. So we set out to find a simple way to convert the raw LAS files from lovely Vermont State Plane coordinates in feet (both horizontal and vertical) to the infinitely useful UTM with meters all around.
So, I've been helping get an Earth Science graduate student going on some change detection work with some lidar data from the State of Vermont. As we were going through some of the sample datasets an interesting, yet not surprising, realization came over us...several of the datasets were in different projections. So we set out to find a simple way to convert the raw LAS files from lovely Vermont State Plane coordinates in feet (both horizontal and vertical) to the infinitely useful UTM with meters all around.There are several options out there, but I rediscovered an old standby, the National Geodetic Survey's VDATUM tool.
Tuesday, November 25, 2014
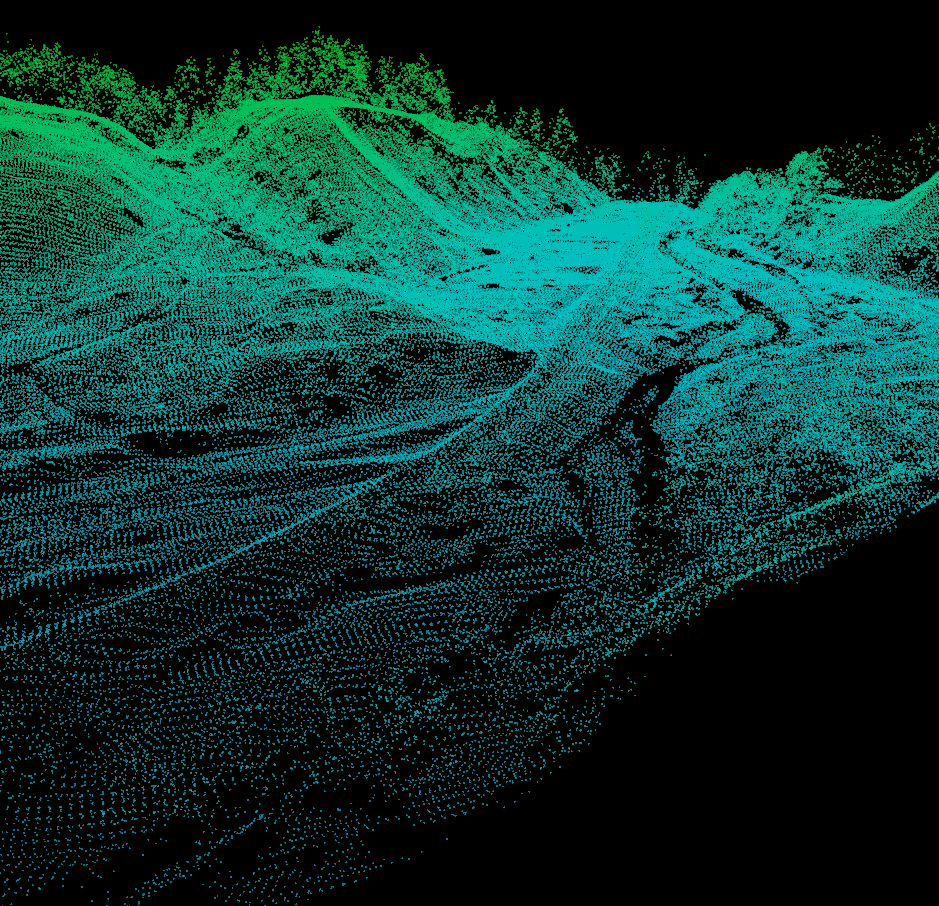
Online Point Cloud Viewer (Finally!!!)

The viewer is by Markus Schütz over at potree.org. It only took a little while to get the code up and running.
Thursday, October 23, 2014
Vermont and New Hampshire Rivers and Lakes in Google Earth
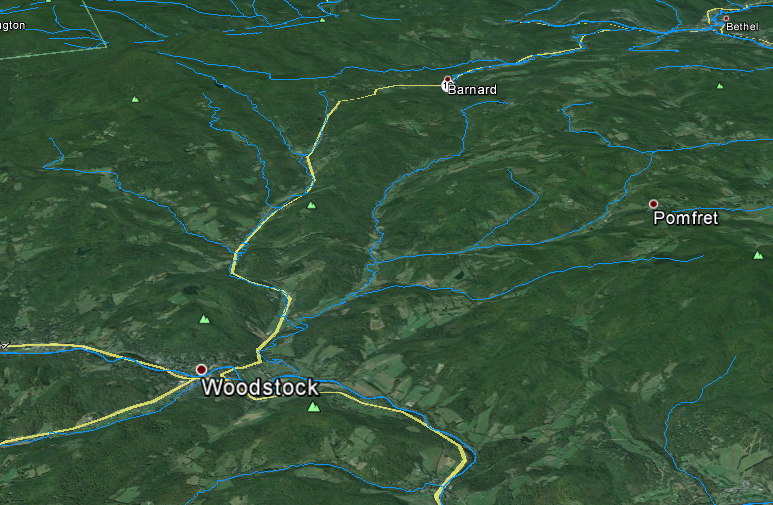
National Hydrological Dataset (NHD) Google Earth layers for Vermont and New Hampshire
Download:
Vermont and New Hampshire NHD Google Earth Layers
There are three files:
- Named Streams
- Named Waterbodies
- Unnamed Streams (this one is big)
Tuesday, October 21, 2014
SfM Fly Throughs
Two new flythroughs from some recent work. The first is all in 3D (red/cyan anaglyph) and is a recent talk I gave as part of the 2014 Neukom Institute Dinner. The second is from some recent work in Massachusetts, the first half of the video is 2D and the second-half (jump to 2:08) is in 3D.
I would definitely recommend viewing full screen. Double-check to make sure the resolution is set to 1080. Depending on your browser you may need to click the YouTube button to "Watch on YouTube.com" to be able to get to full screen.
The data for these were produced with Agisoft Photoscan Pro and the fly throughs were made with Bentley Pointools.
I would definitely recommend viewing full screen. Double-check to make sure the resolution is set to 1080. Depending on your browser you may need to click the YouTube button to "Watch on YouTube.com" to be able to get to full screen.
The data for these were produced with Agisoft Photoscan Pro and the fly throughs were made with Bentley Pointools.
Monday, October 6, 2014
Camera Geometries for SfM - UPDATE
This is a quick update for my original camera geometry post.
Based on work by Mike James and Stuart Robson (Link) and some of my own research it has become apparent that strictly parallel camera geometries produce some interesting distortions in some SFM reconstructions. The parallel nature can cause systematic distortions in final point clouds, DEMs, etc...
Therefore, it is good practice to not limit yourself to one specific geometry. Convergent geometries seem to work the best in most situations. A variety of camera heights also seem to improve things and helps add to the convergent geometry. My suggestion is to play around with different geometries in an area that's analogous to your study area to get a feel for what type of pattern will work best and be efficient.
Based on work by Mike James and Stuart Robson (Link) and some of my own research it has become apparent that strictly parallel camera geometries produce some interesting distortions in some SFM reconstructions. The parallel nature can cause systematic distortions in final point clouds, DEMs, etc...
Therefore, it is good practice to not limit yourself to one specific geometry. Convergent geometries seem to work the best in most situations. A variety of camera heights also seem to improve things and helps add to the convergent geometry. My suggestion is to play around with different geometries in an area that's analogous to your study area to get a feel for what type of pattern will work best and be efficient.
Sunday, July 27, 2014
Helikite Test Flight
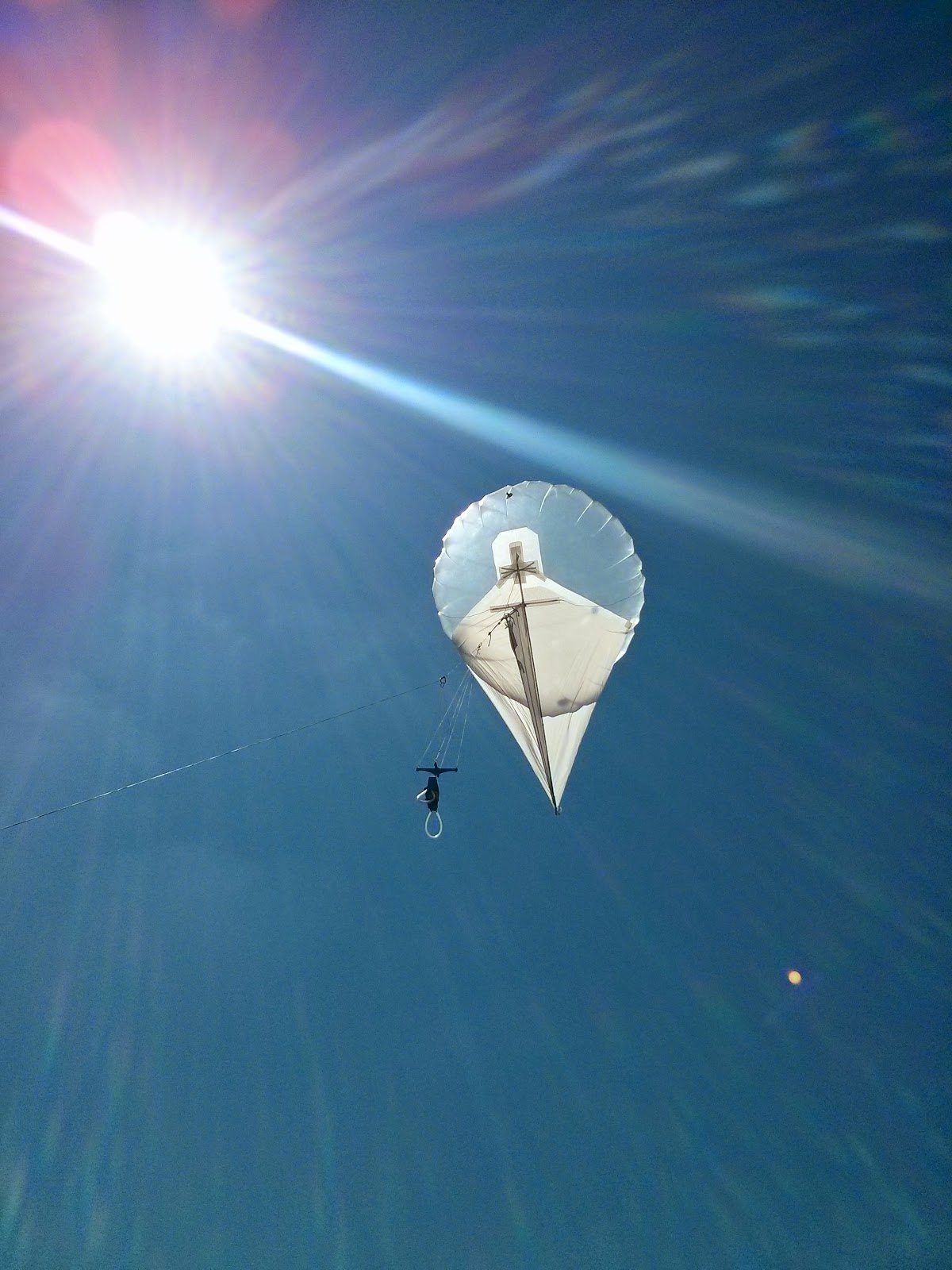 We took out the new Helikite for a test run before it heads out into the field to do some real work. Nothing fancy just a new 3D printed picevet (Chris Fastie's design), and a few natural color images with a Canon A3300 and a few near IR photos with a modified Canon A480.
We took out the new Helikite for a test run before it heads out into the field to do some real work. Nothing fancy just a new 3D printed picevet (Chris Fastie's design), and a few natural color images with a Canon A3300 and a few near IR photos with a modified Canon A480.Friday, July 18, 2014
Heading to Dartmouth
 As some of you know I headed to Dartmouth College at the end of the month to start "life after grad school" with a two-year appointment as a postdoctoral fellow in the William H. Neukom Institute for Computational Science. I've updated my contact info on this site. My Univ. of Oregon email will still work for a while but don't be surprised if you hear back from my Dartmouth account.
As some of you know I headed to Dartmouth College at the end of the month to start "life after grad school" with a two-year appointment as a postdoctoral fellow in the William H. Neukom Institute for Computational Science. I've updated my contact info on this site. My Univ. of Oregon email will still work for a while but don't be surprised if you hear back from my Dartmouth account.Friday, April 4, 2014

Friday, March 21, 2014
Agisoft Photoscan Crash Course (v. 1.0.2)
*Updated version for Photoscan 1.1 is finally here*
A not-so-quick tutorial in using Photoscan to process a single photoset in Agisoft Photoscan Professional version 1.0 (1.0.2 or 1.0.3), for Photoscan version 1.1 please see the updated tutorial.
I have
written this for various research groups at the University of Oregon, Oregon
State University, and Dartmouth College. I hope that this will help others get
started as well. I also plan to add screen shots to this eventually, but for
now this will have to do.
Thursday, February 6, 2014
Camera geometries for Structure-from-Motion mapping

Camera geometry, the way photographs overlap, is an important factor in successful mapping when using Structure-from-Motion (SfM). There are several main geometries that photosets fall into: divergent, convergent, parallel, and whether the camera is pointed at a nadir or oblique angles. The type of geometry you use is dependent on the research question and there is always going to be some natural variation in a photoset but you should attempt to keep a consistent overall geometry in the scene. These are simply guidelines, one of the beautiful things about SfM is that is can be forgiving, so if you do not take perfectly aligned photos your 3D model will not be lost. Also, I cannot stress the important of practice. Before you head out for a full field campaign find an analog to your study site and practice taking photographs using the different camera geometry guidelines. This will help you plan for the field and also let you experiment with the processing workflow and familiarize yourself with how the software behaves.
Tuesday, January 14, 2014
Wired CHDK Trigger for Pole Photography
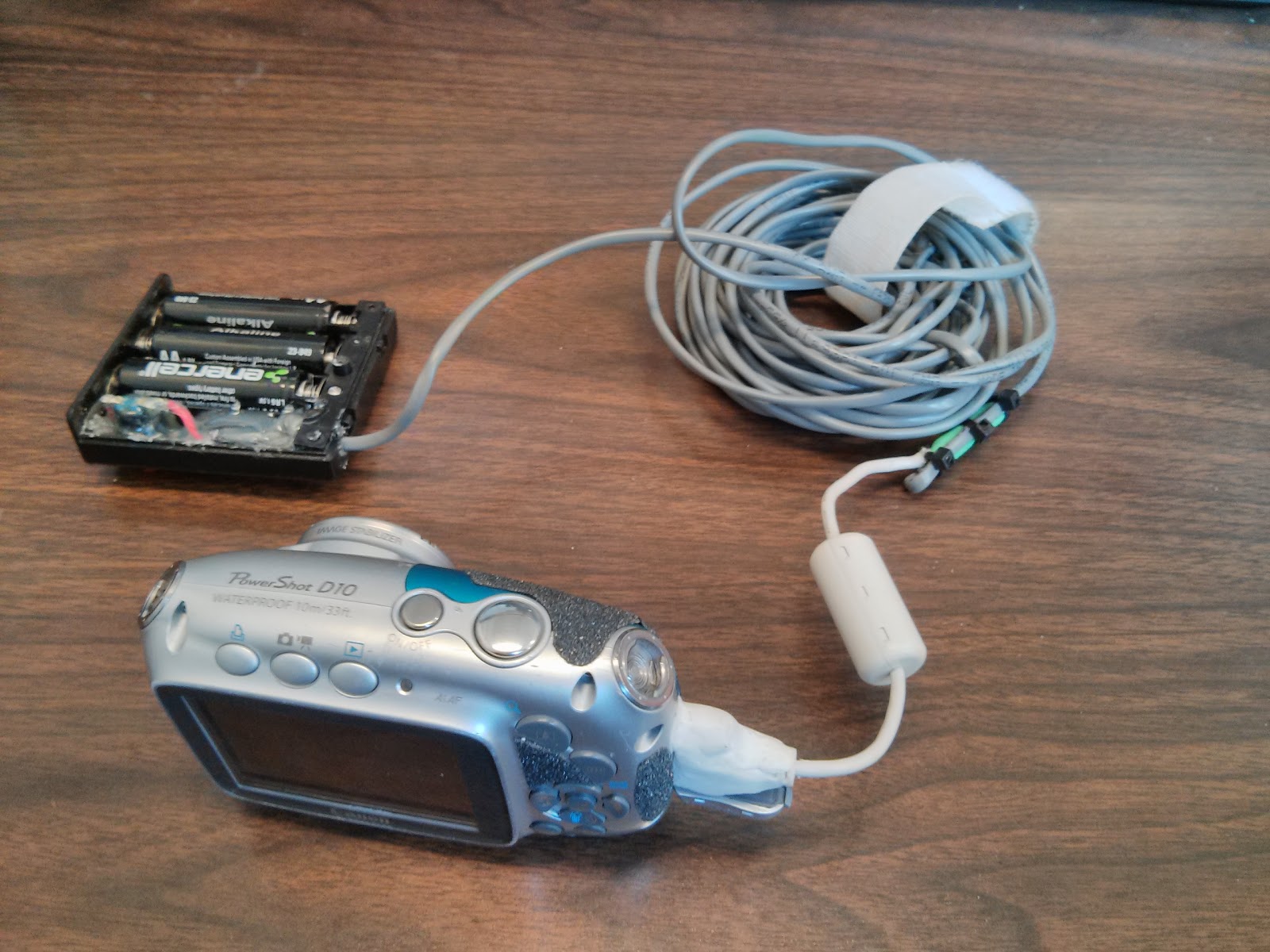 As some of you may know, I use occasionally use pole photography for my research. Getting the camera on the pole is the easy part (Pole Camera), the hard part is getting it to take pictures while it's up there.
As some of you may know, I use occasionally use pole photography for my research. Getting the camera on the pole is the easy part (Pole Camera), the hard part is getting it to take pictures while it's up there.I use almost entirely Canon cameras and CHDK is such a wonderful add-on to the smaller cameras I use. One key thing CHDK allows you to do is use the USB port on the camera to trigger the camera. This post is a rehash of the basic remote trigger that CHDK has on their site (http://chdk.wikia.com/wiki/USB_Remote), but I thought I'd post my design if you're interested in building your own.
Subscribe to:
Comments (Atom)